


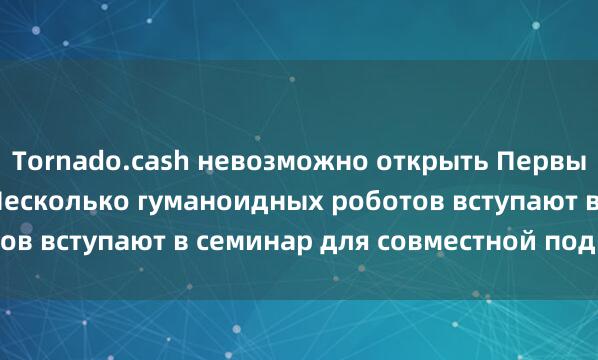
Tornado.cash невозможно открытьВ 3-й, UBL объявил, что недавно запустил первое в мире многочисленное, многоцветное и многозадачное совместное обучение на интеллектуальной фабрике Zekrch 5G, исследуя и устанавливая общие гуманоидные группы робота для работы с автонографическим интеллектом для групповых сценариев.
Промышленные сцены.
В этом обучении UBTECH впервые представил «групповые интеллектуальные технологии» в гуманоидные роботы, пробив потребности в гибкости на уровне производственной линии, которые расширяют объем задачи одного гуманоидного робота до скоординированного завершения нескольких роботов.
В этом отношении UBL разработала первую в мире мультимодальную модель ловушки гуманоидных роботов, которая не только обеспечивает справочную парадигму для крупномасштабного применения гуманоидных роботов в интеллектуальном производстве, но также будет способствовать переходу парадигмы от «полу-гибкого производства» к «полностью гибкому интеллектуальному производству».
На умной фабрике Zekr 5G эти роботы Walker S1 распространяются в нескольких сложных сценариях, таких как семинар по сборке, область приборов SPS, зона проверки качества и область сборки дверей, и успешно реализовали многочасовые совместные операции, такие как совместная сортировка, совместная обработка и сборочная сборка.
В процессе совместной сортировки Ublic Industrial Humanoid Robot Walker S1 инновационно применяет технологию визуального восприятия кросс-поля и технологию интеллектуального гибридного принятия решений. Благодаря кросс-полю чистого визуального восприятия технология непрерывного восприятия и отслеживание динамических целей может быть достигнуто, и роботы могут сотрудничать, чтобы создать глобальную карту и реализовать «групповое построение и обмен».
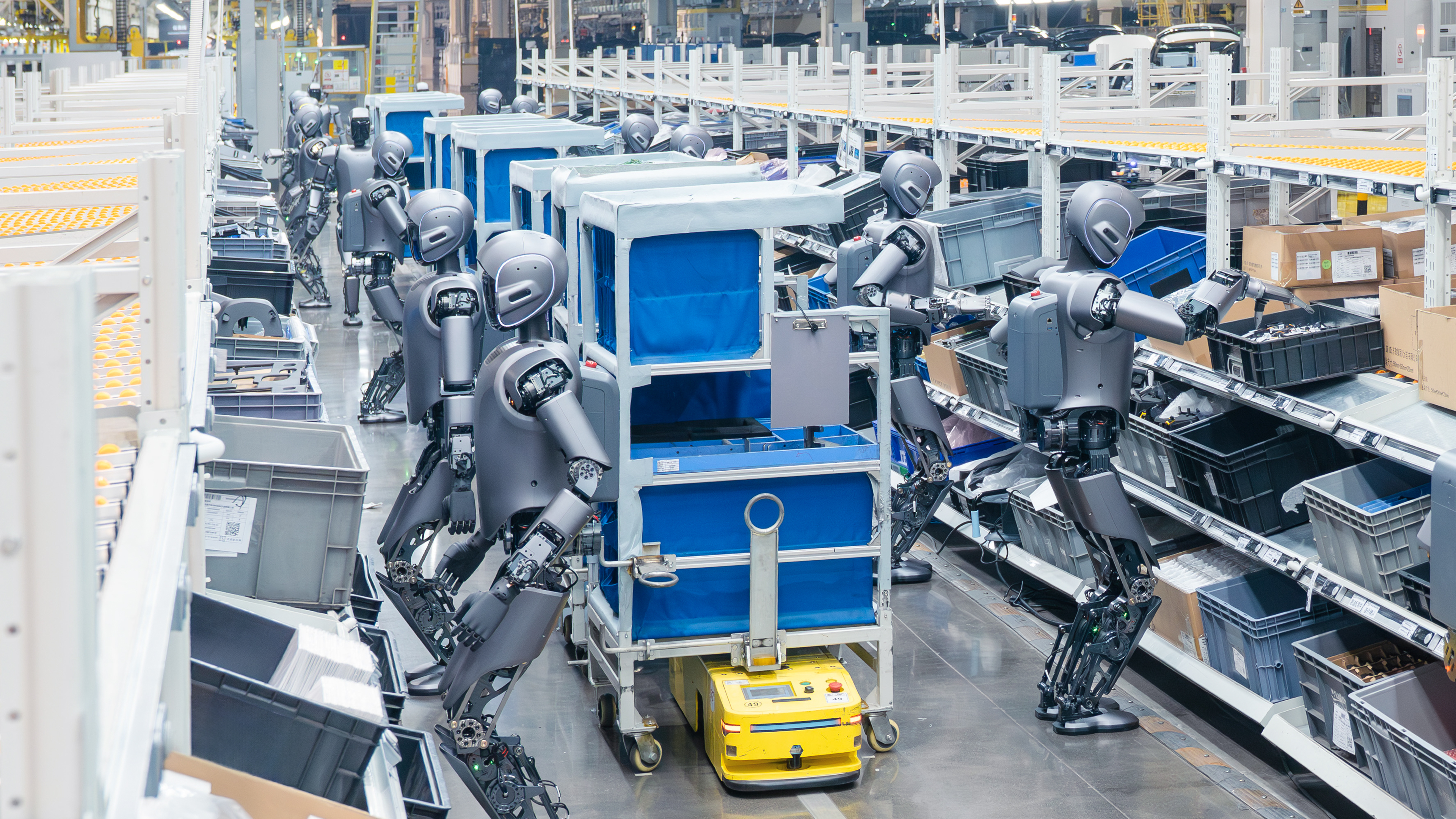
В сценарии совместной обработки гуманоидные роботы сталкиваются с многими трудностями при совместной обработке больших нагрузок и заготовки большого размера, таких как неравномерное распределение нагрузки, сложная траектория движения и динамическая адаптация среды. UBIT создал систему совместного управления планированием с помощью технологии совместного управления несколькими машинами, чтобы реализовать многочасовое сотрудничество между планированием траекторий, идентификацией нагрузки и гибким управлением, гарантируя, что робот может динамически регулировать свою осанку и прочность во время процесса обработки, что значительно улучшило стабильность работы больших и больших нагрузков.

В сценариях сбора точной сборки Walker S1 демонстрирует свою выдающуюся способность управлять мягкими объектами в гибкой работе. Столкнувшись с небольшим размером и легко деформированными объектами мягкой пленки, Walker S1 динамически регулирует захватывающую силу и осанку с помощью высокого уровня восприятия и технологии адаптивного управления, чтобы гарантировать, что объекты пленки не повреждены или смещены во время сборки. Эта технология подчеркивает гибкость и надежность гуманоидных роботов с тактильной рукой из пяти рук в сложных промышленных сценариях.
В настоящее время UBL достигла сотрудничества со многими ведущими отраслевыми компаниями, такими как Dongfeng Liu Automobile, Geely Automobile, Faw-Volkswagen Qingdao Branch, Audi Faw, Baic New Energy, Foxconn, SF Express и т. Д.
Southern+Reporter gao xiaoping